MetaIoT Lab
Here at Mobile, Sensing, Automative & Internet of Things Lab (MetaIoT), which is leaded by Prof. Qian Zhang and Prof. Wei Wang(学校主页). We create the next generation of intelligent unmanned systems for sensing and perception with applications in autonomous systems, AIoT, and embodied AI.
Research Overview
- Spatial Perception and Intelligence for Embodied AI: including embodied spatial intelligence, integrating perception, cognition, and action for autonomous agents in complex environments.
- mmWave/multi-modal 3D Perception and SLAM: including mmWave Radar perception, multi-modal SLAM/navigation for embodied AI and self-driving vehicles.
- AIoT: including AIoT hardware design and embedded systems for industry and healthcare.
Millimeter-wave radar with Spatial-Doppler representation empowers spatial perception and intelligence for embodied AI, enabling reliable sensing and motion understanding in autonomous driving, robotics, and complex dynamic environments.
Millimeter wave radar provides an ideal solution for low-power, self-monitored, ultra accurate radar systems in various industrial applications, such as automotive vehicles, factory automation, drones, material handling, traffic monitoring, and surveillance.
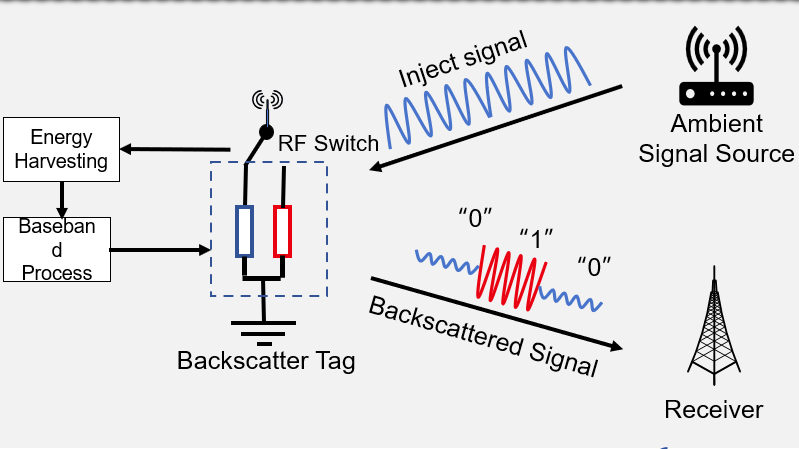
Backscatter uses existing radio frequency signals, such as radio, television, and mobile telephony, to transmit data without a battery or power grid connection. Each such device harvest energy from the ambient signals. It uses that power to modify and reflect the signal with encoded data for communication.
Recent Research Projects
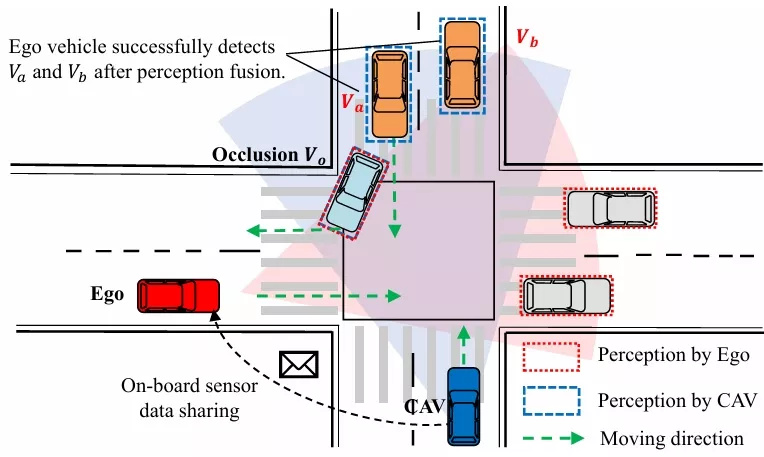
We present a lightweight system that enables accurate and realtime perception fusion with mmWave radar point clouds to improve driving safety. The key insight is that fine-grained spatial information provided by the radar present unique associations with all the vehicles even in two separate views.
To address the coverage limitation of existing wireless sensing technologies, we propose to utilize GPS signals for sensing and prototype the first GPS wireless sensing system on commercial GPS receiver modules. Comprehensive experiments demonstrate that the proposed system can realize meaningful sensing applications.
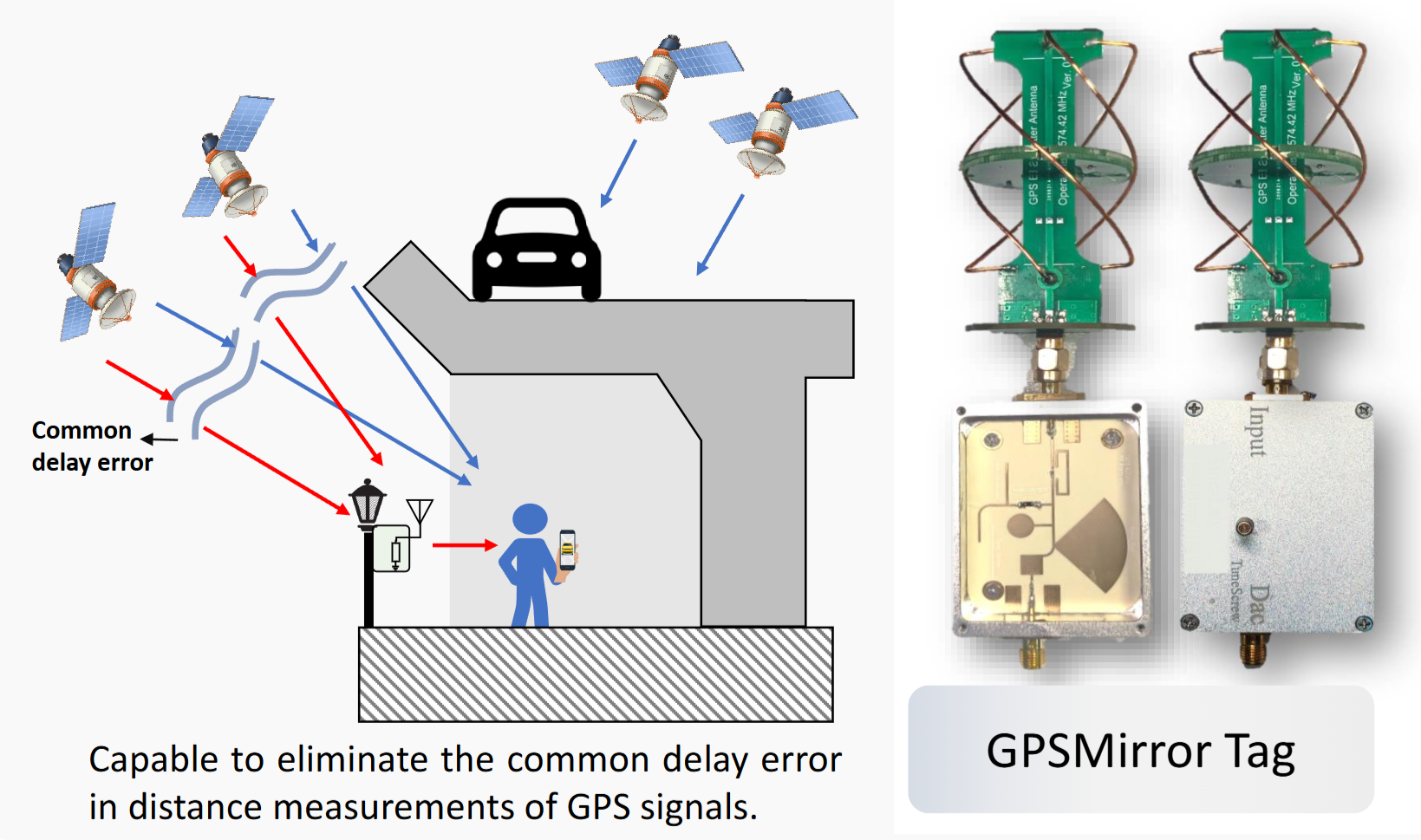
GPS services still suffer from intermittent positioning with poor accuracy in partially shadowed regions like urban canyons, flyover shadows, etc. We fill the gap with GPSMirror, the first GPS-strengthening system that works for unmodified smartphones with the assistance of newly-designed GPS backscatter tags.